Razvrstitev avtomatskih krmilnih sistemov

Niz avtomatske krmilne naprave in krmilnega objekta, ki sta med seboj povezana in medsebojno delujeta v skladu z regulacijskim algoritmom, se imenuje avtomatski krmilni sistem (ACS).
Avtomatske krmilne sisteme lahko razvrstimo glede na način krmiljenja in funkcionalne značilnosti. Glede na način krmiljenja so vsi sistemi razdeljeni v dva velika razreda: navadni (nesamoregulacijski) in samoregulacijski (adaptivni).
Običajni sistemi, ki spadajo v kategorijo preprostih, med upravljanjem ne spreminjajo svoje strukture. Najbolj razviti in razširjeni so v livarnah in termičnih delavnicah. Običajni avtomatski krmilni sistemi so razdeljeni v tri podrazrede: odprti, zaprti in kombinirani krmilni sistemi.
Sistemi avtomatskega krmiljenja z odprto zanko pa so razdeljeni na avtomatske toge krmilne sisteme (SZHU) in sisteme za nadzor motenj.
Pri prvih sistemih regulator deluje na objekt krmiljenja ne glede na dobljeni rezultat, to je vrednost regulirane veličine in zunanjo motnjo. Sistemi za nadzor motenj delujejo na principu, da se krmilno delovanje generira glede na zunanje motnje, ki vplivajo na objekt krmiljenja.
Kot primer razmislite o ogrevalnem sistemu livarne ali toplotne delavnice. V tem primeru je poraba tople vode v toplovodu trgovine odvisna od zunanjih vremenskih razmer. Hladneje kot je zunaj, več tople vode dovaja radiatorje in obratno.
Zaprti avtomatski krmilni sistemi, ki delujejo na principu odklona, se imenujejo tudi avtomatski krmilni sistemi (ACS). Njihova značilnost je prisotnost zaprtega cikla prehoda signala, to je prisotnost povratnega kanala, skozi katerega se informacije o stanju nadzorovane spremenljivke prenašajo na vhod primerjalnega elementa.
Avtomatski krmilni sistemi so zasnovani za reševanje treh problemov: stabilizacija nadzorovane vrednosti (stabiliziranje ATS), spreminjanje nadzorovane vrednosti v skladu z znanimi (programirani ATS) ali neznanimi (sledilni ATS) programi.
Pri stabilizaciji ATS je nastavljena točka krmiljene spremenljivke konstantna. Primer takega sistema je sistem za regulacijo temperature v delovnem prostoru termopeči. Pri programski ATS se vrednost nadzorovane spremenljivke spreminja skozi čas v skladu z vnaprej izdelanim (znanim) programom.
V servo sistemih se nastavljena vrednost krmiljene spremenljivke sčasoma spreminja po prej neznanem programu.Sledilni in programski ATS se od stabilizatorjev razlikujejo po principu obdelave referenčnega signala.
Najbolj značilen primer servo krmiljenja je samodejno vzdrževanje danega razmerja med porabo goriva in zraka pri regulaciji zgorevalnega procesa v pečeh za taljenje in ogrevanje goriva.
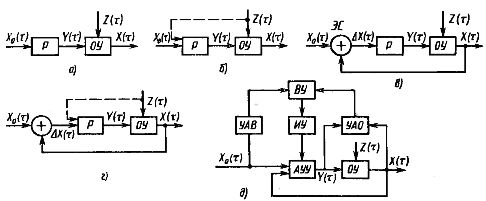
Avtomatski krmilni sistemi: a — odprt, b — odprt pristranski, c — zaprt, d — kombiniran, d — samoregulacijski, P — krmilnik, OU — nadzorni objekt, ES — primerjalni element, UAV — naprava za analizo krmilnega delovanja. : VU — računalniška naprava, IU je izvršilna naprava, AUU je avtomatska krmilna naprava, AUO je naprava za analizo nadzornega objekta.
Kombinirani sistemi združujejo prednosti sistemov krmiljenja odstopanj in motenj, kar povečuje natančnost krmiljenja. Učinek neupoštevanih motenj v kombiniranih sistemih se kompenzira ali oslabi z nadzorom pristranskosti.
Samoregulacijske (prilagodljive) sisteme lahko razdelimo v tri podrazrede: ekstremni sistemi, samonaravnavni sistemi in samonaravnalni sistemi.
Sistemi ekstremne regulacije se imenujejo stabilizacijski, sledilni ali programirani nadzorni sistemi, v katerih se nastavitev, program ali zakon reprodukcije samodejno spreminjajo glede na spremembe zunanjih pogojev ali notranjega stanja sistema, da se ustvari najbolj ugoden (optimalen) način delovanja nadzorni objekt.
V takšnih sistemih je namesto stalne nastavitve ali programa vgrajena avtomatska iskalna naprava, ki analizira vsako lastnost objekta (učinkovitost, produktivnost, gospodarnost itd.) in glede na dobljeni rezultat poda zahtevano vrednost krmiljeno spremenljivko na regulacijsko napravo, tako da ima ta karakteristika izjemno vrednost ob zveznem spreminjanju različnih motečih vplivov, ki vplivajo na pogoje delovanja sistema.
V sistemih s samonastavljivimi parametri, ko se spremenijo zunanji pogoji ali značilnosti nadzorovanega objekta, pride do samodejne (ne po vnaprej določenem programu) spremembe spremenljivih parametrov krmilne naprave, da se zagotovi stabilno delovanje sistema in vzdržuje nadzorovano vrednost na dani ali optimalni ravni.
V sistemih s samonastavljivo strukturo, ko se spremenijo zunanji pogoji in značilnosti krmilnega objekta, se elementi v povezovalni shemi preklopijo ali vanj vnesejo nove elemente. Namen teh sprememb (izbire) strukture je doseči boljšo rešitev problema upravljanja.
Izbira strukture poteka s samodejnim iskanjem z uporabo računskih in logičnih operacij. Takšni sistemi se ne smejo samo prilagajati vsem spremembam zunanjih pogojev in lastnosti objekta, temveč tudi normalno delovati tudi ob okvarah ali poškodbah posameznih elementov, ustvarjati nove tokokroge, ki nadomestijo pokvarjene. Samoregulacijske sisteme je mogoče izboljšati, "nabrati izkušnje" s hitrim preizkušanjem več možnosti, izbiro in "zapomnitvijo" najboljše.
Po funkcijski klasifikaciji so vsi sistemi avtomatskega krmiljenja razdeljeni v štiri razrede:
-
sistemi za usklajevanje delovanja mehanizmov,
-
sistemi za regulacijo parametrov tehnoloških procesov,
-
avtomatski krmilni sistemi,
-
avtomatski zaščitni in blokirni sistemi.

Sistemi, namenjeni usklajevanju delovanja posameznih mehanizmov obrata ali obrata kot celote avtomatski togi krmilni sistemi (SZHU).
Tehnološki procesi avtomatskih krmilnih sistemov (ACS) zagotavljajo vzdrževanje nadzorovane vrednosti na dani ravni ali njeno spremembo po danem programu.
Avtomatski krmilni sistemi (ACS) vsebujejo sredstva in metode za pridobivanje informacij o trenutnih vrednostih parametrov tehnološkega procesa (temperatura, tlak, vsebnost prahu ali plina v zraku itd.) Brez neposrednega sodelovanja človeka.
Avtomatski zaščitni sistemi (SAZ) in sistemi za blokiranje (SAB) preprečujejo nastanek izrednih razmer pri delovanju opreme v stabilnem stanju.