Senzorji tehnoloških parametrov — sila, tlak, navor
Za izvajanje avtomatiziranega in zelo natančnega vodenja tehnoloških procesov je vedno potrebno imeti na razpolago podatke o trenutnih vrednostih ključnih tehnoloških parametrov. Običajno se v ta namen uporabljajo različni senzorji: sile, tlak, navor itd. Oglejmo si tri vrste senzorjev, razumemo načelo njihovega delovanja.

Najprej opozorimo, da se pri konstrukciji senzorjev sile ali navora uporabljajo občutljivi elementi, katerih nekatere lastnosti se spreminjajo v skladu s trenutno stopnjo deformacije, ki je posledica enega ali drugega zunanjega vpliva.
To so lahko elastične kovinske plošče, vzmeti ali gredi, katerih deformacija se prenaša na magnetostrikcijski, piezoelektrični ali polprevodniški element, katerega električni ali magnetni parametri bodo neposredno odvisni od stopnje deformacije. Dovolj bo, da izmerimo ta parameter, da dobimo idejo o velikosti deformacije in s tem sili (tlak, navor).
Tenzometrični merilniki napetosti

Najenostavnejši merilnik napetosti na osnovi žični pretvornik merilnika napetosti vključuje mehanski elastični element, ki je izpostavljen deformaciji, in nanj pritrjen merilnik napetosti, katerega deformacija se pretvori neposredno v električni signal.
Tanka (s premerom od 15 do 60 mikronov) žica iz nikroma, konstantana ali ellinvarja, ki je zložena s kačo in pritrjena na filmsko podlago, deluje kot senzor merilnika napetosti. Takšen pretvornik se prilepi na površino, katere deformacijo merimo.
Deformacija mehanskega elastičnega elementa povzroči raztezanje ali stiskanje žice vzdolž njegove dolžine, medtem ko se njen presek zmanjša ali poveča, kar vpliva na spremembo odpornosti pretvornika na električni tok.
Z merjenjem tega upora (padec napetosti na njem) dobimo predstavo o velikosti mehanske deformacije in s tem sili, če so znani mehanski parametri deformiranega elementa.
Senzorji navora manometra

Za merjenje momenta sile se uporabljajo občutljivi elastični elementi v obliki vzmeti ali tankih gredi, ki se med tehnološkim procesom zvijajo. Elastična kotna deformacija, to je relativni kot začetka in konca vzmeti, se izmeri in pretvori v električni signal.
Elastični element je običajno zaprt v cevi, katere en konec je fiksno pritrjen, drugi pa je povezan s senzorjem kotnega premika, ki meri kot divergence med koncema cevi in deformabilnim elementom.
Tako dobimo signal, ki nosi informacijo o velikosti navora.Za odstranitev signala iz vzmeti so žice elementa deformacijskega upora povezane z drsnimi obroči na ščetke.
Magnetostrikcijski senzorji sile
Obstajajo tudi senzorji sile z magnetostrikcijskimi pretvorniki merilnika napetosti. Uporabljeno tukaj inverzni magnetostrikcijski pojav (Villarijev učinek), ki je sestavljen iz dejstva, da se ob pritisku na jedro iz zlitine železa in niklja (kot je permaloid) spremeni njegova magnetna prepustnost.
Vzdolžno stiskanje jedra vodi do raztezanja njegove histerezne zanke, se strmina zanke zmanjša, kar vodi do zmanjšanja vrednosti magnetne prepustnosti oziroma do zmanjšanja induktivnosti ali medsebojne induktivnosti navitij senzorja.
Ker so magnetne karakteristike nelinearne in tudi zaradi dejstva, da nanje močno vpliva temperatura, je potrebna uporaba kompenzacijskega vezja.
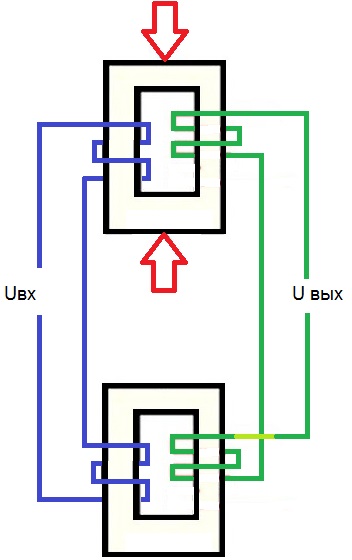
Za odškodnino velja naslednja splošna shema. Zaprto magnetostriktivno magnetno jedro iz nikelj-cinkovega ferita je izpostavljeno merljivi sili. Takšno jedro ne doživlja pritiska sile, vendar sta navitja obeh žic povezana med seboj, zato pride do spremembe skupnega EMF.
Primarna navitja so enaka in zaporedno povezana, napaja jih izmenični tok s frekvenco v desetih kilohercih, medtem ko so sekundarna navitja (prav tako enaka) vklopljena nasprotno in v odsotnosti deformacijske sile je skupni EMF enak 0. Če se tlak na prvem jedru poveča, je skupni EMF na izhodu enak nič in je sorazmeren z deformacijo.