Električni stroji z izmeničnim tokom
Električni stroji se uporabljajo za pretvarjanje mehanske energije v električno (generatorji izmeničnega in enosmernega toka) in obratno (elektromotorji).
V vseh teh primerih se uporabljajo v bistvu tri glavna odkritja na področju elektromagnetizma: pojav mehanske interakcije tokov, ki ga je odkril Ampere leta 1821, pojav elektromagnetne indukcije, ki ga je odkril Faraday leta 1831, in teoretični povzetek teh pojavov, ki ga je naredil Lenz (1834) v svojem znanem zakonu o smeri induciranega toka (pravzaprav je Lenzov zakon napovedal zakon o ohranitvi energije za elektromagnetne procese).

Za pretvorbo mehanske energije v električno energijo ali obratno je potrebno ustvariti relativno gibanje prevodnega tokokroga s tokom in magnetnim poljem (magnet ali tok).
V električnih strojih, zasnovanih za neprekinjeno delovanje, se uporablja rotacijsko gibanje gibljivega dela stroja (rotorja stroja za izmenični tok), ki se nahaja znotraj mirujočega dela (statorja).Tuljava stroja, ki služi za ustvarjanje magnetnega polja, se imenuje induktor, tuljava, po kateri teče obratovalni tok, pa armatura. Oba zadnja izraza se uporabljata tudi za stroje z enosmernim tokom.
Za povečanje magnetne indukcije so strojna navitja nameščena na feromagnetna telesa (jeklo, lito železo).
Vsi električni stroji imajo lastnost reverzibilnosti, to pomeni, da se lahko uporabljajo kot generatorji električne energije in kot elektromotorji.

Asinhroni motorji
Uporabljajo se asinhroni motorji ena od manifestacij elektromagnetne indukcije… Pri tečajih fizike je prikazano na naslednji način:
Pod bakrenim diskom, ki se lahko vrti okoli navpične osi, ki gre skozi njegovo središče, je nameščen navpični podkvasti magnet, ki se vrti okoli iste osi (mehanska interakcija med diskom in magnetom je izključena). V tem primeru se disk začne vrteti v isti smeri kot magnet, vendar z manjšo hitrostjo. Če povečate mehansko obremenitev diska (na primer s povečanjem trenja osi proti potisnemu ležaju), se njegova hitrost vrtenja zmanjša.
Fizikalni pomen tega pojava je enostavno pojasniti s teorijo elektromagnetne indukcije: ko se magnet vrti, nastane rotacijsko magnetno polje, ki inducira vrtinčne tokove v disku, velikost slednjih pa je ob nespremenjenih pogojih odvisna od relativna hitrost polja in diska .
Po Lenzovem zakonu se mora disk vrteti v smeri polja. V odsotnosti trenja mora disk pridobiti kotno hitrost, ki je enaka hitrosti magneta, po kateri bo inducirana emf izginila. V resničnem življenju je trenje neizogibno prisotno in disk postane počasnejši.Njegova velikost je odvisna od mehanskega zavornega momenta, ki ga ima disk.
Neskladje med hitrostjo vrtenja diska (rotorja) in hitrostjo vrtenja magnetnega polja se odraža v imenu motorjev.
Načelo delovanja asinhronih motorjev:
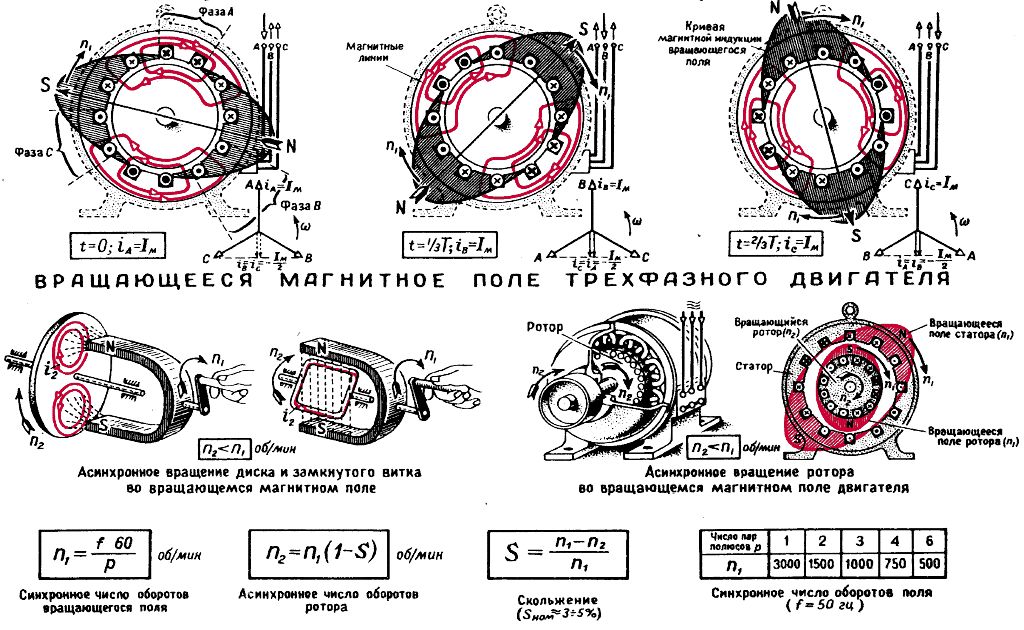
V tehničnih asinhronih motorjih (najpogosteje trifaznih) se ustvari vrtljivo magnetno polje polifazni tokteče okoli mirujočega statorskega navitja. Pri frekvenci trifaznega toka je in število statorskih tuljav 3p vrtilno polje naredi n = f / p vrtljajev / sek.

V statorski votlini je nameščen vrtljiv rotor. Na njegovo gred je mogoče priključiti vrtljivi mehanizem.Pri najpreprostejših motorjih "veveričje celice" je rotor sestavljen iz sistema vzdolžnih kovinskih palic, nameščenih v utore jeklenega cilindričnega telesa. Žice so v kratkem stiku z dvema obročema. Za povečanje navora je polmer rotorja dovolj velik.
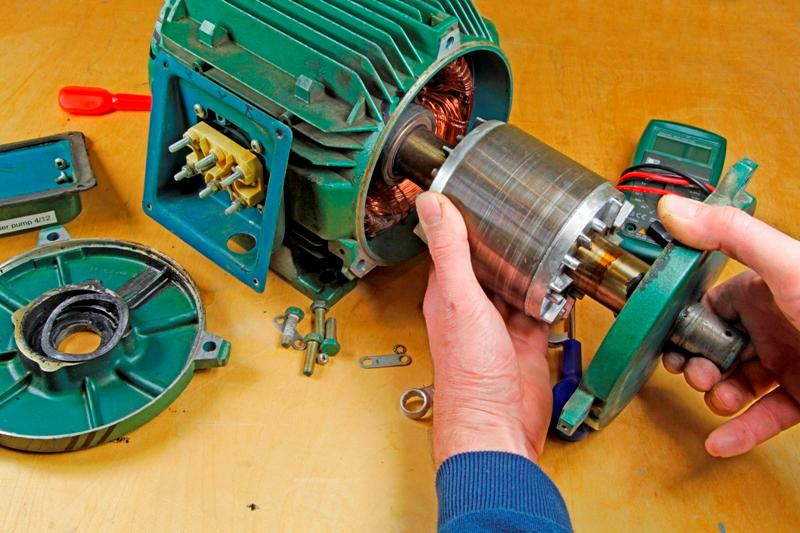
Pri drugih izvedbah motorjev (običajno visokozmogljivih motorjev) rotorske žice tvorijo odprto trifazno navitje. Konci tuljav so kratko sklenjeni v samem rotorju, vodi pa so speljani do treh drsnih obročev, nameščenih na gredi rotorja in izoliranih od nje.
Na te obroče je s pomočjo drsnih kontaktov (ščetk) priključen trifazni reostat, ki služi za zagon motorja v gibanju. Po vrtenju motorja se reostat popolnoma odstrani in rotor postane veveričja kletka (glejte — Asinhroni motorji z navitim rotorjem).

Na ohišju statorja je priključna plošča. Navitja statorja se izpeljejo do njih. Lahko se vključijo zvezda ali trikotnik, odvisno od omrežne napetosti: v prvem primeru je omrežna napetost lahko 1,73-krat višja od druge.
Imenuje se vrednost, ki označuje relativni pojemek rotorja v primerjavi s statorskim poljem indukcijskega motorja zdrs… Spreminja se od 100 % (v trenutku zagona motorja) do nič (idealen primer gibanja rotorja brez izgub).
Obračanje smeri vrtenja indukcijskega motorja se doseže z medsebojnim preklopom vsakih dveh linearnih vodnikov električnega omrežja, ki napaja motor.

Motorji s kletko se pogosto uporabljajo v industriji. Prednosti asinhronih motorjev so preprostost zasnove in odsotnost drsnih kontaktov.
Do nedavnega je bila glavna pomanjkljivost takih motorjev težava pri regulaciji hitrosti, ker če se za to spremeni napetost statorskega tokokroga, se navor močno spremeni, vendar je bilo tehnično težko spremeniti frekvenco napajalnega toka. Sodobne mikroprocesorske naprave se zdaj pogosto uporabljajo za nadzor frekvence napajalnega toka za spreminjanje hitrosti motorjev — frekvenčni pretvorniki.
Alternatorji
Alternatorji so izdelani za znatno moč in visoko napetost. Tako kot asinhroni stroji imajo dva navitja. Običajno je navitje armature nameščeno v ohišju statorja. Induktorji, ki ustvarjajo primarni magnetni tok, so nameščeni na rotorju in jih napaja vzbujevalnik - majhen enosmerni generator, nameščen na gredi rotorja. V strojih z veliko močjo vzbujanje včasih ustvari popravljena izmenična napetost.
Zaradi nepremičnosti navitja armature izginejo tehnične težave, povezane z uporabo drsnih kontaktov pri velikih močeh.
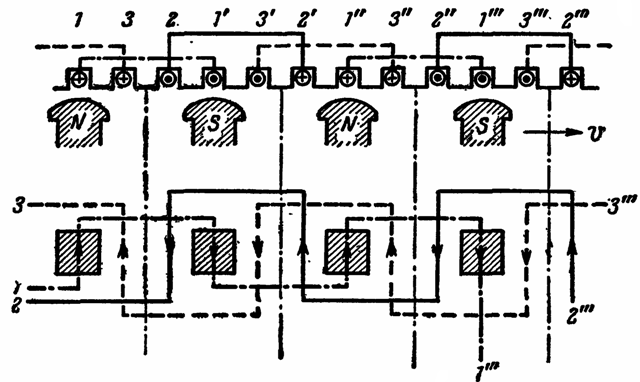
Spodnja slika prikazuje shemo enofaznega generatorja. Njegov rotor ima osem polov. Na njih so navite tuljave (niso prikazane na sliki), ki jih napaja zunanji vir z enosmernim tokom na drsnih obročih, nameščenih na gredi rotorja. Tuljave polov so navite tako, da se predznaki polov, obrnjenih proti statorju, izmenjujejo. Število polov mora biti sodo.
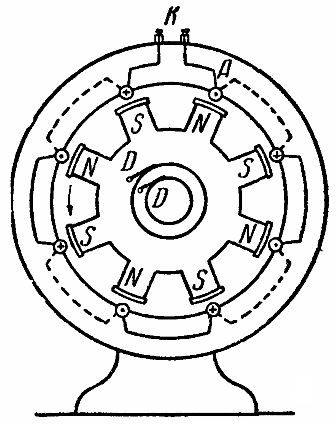
Navitje armature se nahaja v ohišju statorja. Njegove dolge delujoče "aktivne" žice, pravokotne na ravnino risbe, so na sliki prikazane s krogi, prečkajo jih črte magnetne indukcije, ko se rotor vrti.
Krogi prikazujejo trenutno porazdelitev smeri induciranih električnih polj. Povezovalne žice, ki potekajo vzdolž sprednje strani statorja, so prikazane s polnimi črtami, na zadnji strani pa s črtkanimi črtami. K-sponke se uporabljajo za povezavo zunanjega tokokroga z navitjem statorja. Smer vrtenja rotorja je označena s puščico.
Če mentalno odrežete stroj vzdolž polmera, ki poteka med sponkami K, in ga obrnete v ravnino, bo relativni položaj navitja statorja in polov rotorja (stran in načrt) prikazan s shematsko risbo:
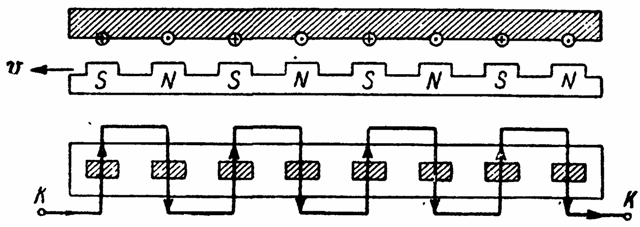
Glede na sliko se prepričamo, da so vse aktivne žice (ki potekajo skozi poli induktorja) povezane med seboj zaporedno in da se EMF, induciran v njih, sešteje. Faze vseh EMF so očitno enake.Med enim popolnim vrtenjem rotorja bodo v vsaki od žic (in torej v zunanjem tokokrogu) pridobljene štiri popolne periode spremembe toka.
Če ima električni stroj p parov polov in se rotor vrti z n vrtljaji na sekundo, je frekvenca izmeničnega toka, ki ga sprejema stroj, f = pn hz.
Ker mora biti frekvenca EMF v omrežju konstantna, mora biti hitrost vrtenja rotorjev konstantna. Za pridobitev EMF tehnične frekvence (50 Hz) je mogoče uporabiti relativno počasno vrtenje, če je število polov rotorja dovolj veliko.
Za pridobitev trifaznega toka so v telo statorja nameščeni trije ločeni navitji. Vsak od njih je zamaknjen glede na druga dva za tretjino ločne razdalje med sosednjimi (nasprotnimi) poli induktorjev.
Preprosto je preveriti, da ko se induktorji vrtijo, se v tuljavah inducirajo elektromagnetna polja, premaknjena v fazi (v času) za 120 °. Konci tuljav so odstranjeni iz stroja in jih je mogoče povezati v zvezdo ali trikot.
V generatorju je relativna hitrost polja in prevodnika določena s premerom rotorja, številom vrtljajev rotorja na sekundo in številom parov polov.

Če generator poganja vodni tok (hidrogenerator), je običajno narejen s počasnimi vrtljaji. Da bi dosegli želeno frekvenco toka, je potrebno povečati število polov, kar posledično zahteva povečanje premera rotorja.
Zaradi številnih tehničnih razlogov močni generatorji vodika običajno imajo navpično gred in se nahajajo nad hidravlično turbino, zaradi česar se vrtijo.

Generatorji, ki jih poganjajo parne turbine — Turbinski generatorji so običajno visokohitrostni. Zaradi zmanjšanja mehanskih sil imajo majhne premere in temu primerno majhno število polov.Številni tehnični vidiki zahtevajo izdelavo turbogeneratorjev s horizontalno gredjo.
Če generator poganja motor z notranjim zgorevanjem, ga imenujemo dizelski generator, saj se dizelski motorji praviloma uporabljajo kot motorji, ki porabijo cenejše gorivo.

Reverzibilnost generatorja, sinhroni motorji
Če se na navitje statorja generatorja napaja izmenična napetost iz zunanjega vira, bo prišlo do interakcije polov induktorja z magnetnim poljem toka, ustvarjenega v statorju, in navori iz iste smeri bodo delovali na vseh polih.
Če se rotor vrti s takšno hitrostjo, da se bo kmalu po polovici obdobja izmeničnega toka naslednji pol induktorja (nasproti predznaka prvemu polu) prilegal pod obravnavano žico statorskega navitja, potem bo predznak interakcijska sila med njim in tokom, ki je spremenil svojo smer, bo ostala enaka.
Pod temi pogoji se bo rotor, ki je pod stalnim vplivom navora, še naprej premikal in bo lahko poganjal kateri koli mehanizem. Premagovanje upora gibanju rotorja bo nastalo zaradi energije, ki jo porabi omrežje, in generator bo postal elektromotor.

Vendar je treba opozoriti, da je neprekinjeno gibanje možno le pri strogo določeni hitrosti vrtenja, saj bo v primeru odstopanja od nje pospeševalni moment delno deloval na vsakem od polov rotorja, ki se giblje med obema vodnikoma stator, del časa - ustavljanje .
Zato mora biti hitrost vrtenja motorja strogo določena, - čas, v katerem se pol zamenja z naslednjim, mora sovpadati s polovično periodo toka, zato se takšni motorji imenujejo sinhrono.
Če se na navitje statorja s stacionarnim rotorjem uporabi izmenična napetost, potem, čeprav vsi poli rotorja v prvi polovici cikla toka doživljajo delovanje vrtilnih momentov istega znaka, še vedno zaradi vztrajnosti rotor se ne bo imel časa premakniti. V naslednjem polciklu se bo predznak vrtilnih momentov za vse pole rotorja spremenil v nasprotno.
Zaradi tega bo rotor vibriral, vendar se ne bo mogel vrteti. Zato je treba sinhronski motor najprej naviti, to je pripeljati na normalno število vrtljajev, šele nato vključiti tok v navitju statorja.
Razvoj sinhronih motorjev se izvaja z mehanskimi metodami (z nizkimi močmi) in posebnimi električnimi napravami (z velikimi močmi).
Pri majhnih spremembah obremenitve se bo hitrost motorja samodejno spremenila, da se prilagodi novi obremenitvi. Torej, ko se obremenitev gredi motorja poveča, se rotor takoj upočasni. Zato se spremeni fazni zamik med omrežno napetostjo in nasprotno inducirano EMF, ki jo inducira induktor v navitju statorja.
Poleg tega reakcija armature povzroči razmagnetenje induktorjev, tako da se statorski tok poveča, induktorji doživijo povečan navor in motor se začne ponovno sinhrono vrteti, pri čemer premaga povečano obremenitev. Podoben proces se zgodi z zmanjšanjem obremenitve.
Z ostrimi nihanji obremenitve je lahko ta prilagodljivost motorja nezadostna, njegova hitrost se bo bistveno spremenila, bo "padel iz sinhronizma" in se sčasoma ustavil, medtem ko indukcijski EMF, induciran v statorju, izgine in tok v njem se poveča ostro. Zato se je treba izogibati ostrim nihanjem obremenitve. Če želite ustaviti motor, morate očitno najprej odklopiti statorsko vezje in nato odklopiti dušilke; pri zagonu motorja se morate držati obratnega vrstnega reda.
Sinhroni motorji se najpogosteje uporabljajo za pogon mehanizmov, ki delujejo s konstantno hitrostjo. Tu so prednosti in slabosti sinhronskih motorjev ter načini njihovega zagona: Sinhroni motorji in njihova uporaba
Učni filmski trak - "Sinhroni motorji", ki ga je leta 1966 ustvarila tovarna učno-vizualnih pripomočkov. Ogledate si ga lahko tukaj: Filmski trak «Sinhroni motor»
