Električna gred in njena uporaba v električnem pogonu kovinsko rezalnih strojev
 Članek obravnava napravo, princip delovanja in primere uporabe električnih sistemov za sinhrono vrtenje (električne gredi) v kovinskorezalnih strojih in napravah.
Članek obravnava napravo, princip delovanja in primere uporabe električnih sistemov za sinhrono vrtenje (električne gredi) v kovinskorezalnih strojih in napravah.
Predpostavimo, da se dve gredi, ki med seboj nista mehansko povezani, vrtita z enakimi hitrostmi, ne da bi se obračali druga glede na drugo. Za zagotovitev takšnega sinhronega in sofaznega vrtenja z motorjema D1 in D2, ki vrtita gredi A oziroma II (slika 1), povežite pomožna asinhronska stroja A1 in A2 s faznimi rotorji. Navitja rotorja teh strojev so povezana drug proti drugemu.
Če sta vrtilni hitrosti obeh strojev in položaji njunih rotorjev enaki, potem so elektromotorne sile, inducirane v navitjih rotorjev strojev A1 in A2, enake in usmerjene drug proti drugemu (slika 2, a) in tok ne teče v tokokrogu rotorja.
Predpostavimo, da smer vrtenja polja pomožnih strojev sovpada s smerjo vrtenja njihovih rotorjev.Ko se vrtenje stroja A2 upočasni, bo njegov rotor zaostajal za rotorjem A1, kar bo povzročilo e. itd. c Ep2, induciran v navitju rotorja, se bo premaknil v fazi v napredek (slika 2, b) in v rotorskem krogu strojev A1 in A2 pod delovanjem vektorske vsote e. itd. z E se pojavi izravnalni tok Az.
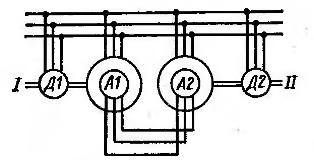
riž. 1. Shema sinhrone komunikacije
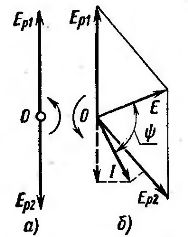
riž. 2. Vektorski diagrami sinhronega komunikacijskega sistema
Trenutni vektor I bo zaostajal za vektorjem e. itd. z E v kotu φ... Projekcija trenutnega vektorja Az na vektor e itd. v. Ep2 sovpada s tem vektorjem v smeri. Projekcija tokovnega vektorja na vektor e. itd. str. Ep1 je namenjen njemu. Iz tega sledi, da bo stroj A2 deloval v motornem načinu, stroj A1 pa v generatorskem načinu. V tem primeru bo gred stroja A2 pospešena, gred stroja A1 pa upočasnjena. Na ta način bodo stroji razvili navore, ki bodo ponovno vzpostavili sinhrono vrtenje gredi. I in II ter prejšnji usklajeni položaj v prostoru rotorjev strojev A1 in A2. Rotorji teh strojev se lahko vrtijo tako v smeri vrtenja polja kot v nasprotni smeri.
Ta sistem se imenuje električni sinhroni rotacijski sistem… Imenuje se tudi električna gred… Sinhroni rotacijski sistem lahko nadomesti na primer vodilne vijake v vijačnih stružnicah.
Ker podajalni tokokrogi strojev za rezanje kovin v primerjavi s tokokrogi glavnega gibanja običajno porabijo malo energije, lahko za sinhronizacijo glavnega gibanja s podajanjem uporabimo preprostejšo shemo sinhronega vrtenja (slika 3).V tem primeru je neizogibno stalno neskladje med položaji rotorjev strojev A1 in A2, brez katerega ne bi bilo toka v tokokrogu rotorja stroja A2 in ne bi mogel premagati momenta uporovnih sil napajalni krog. Ker stroj A2 prejema moč iz statorja in rotorja, ta sistem električne gredi zahteva šestžično povezavo z motorjem, ki je v mnogih primerih nameščen na premikajočem se strojnem bloku, običajno prikazanem na sliki s pikčasto črto.
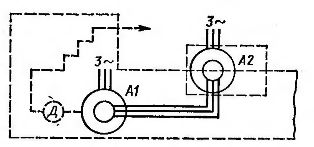
riž. 3. Sinhroni komunikacijski sistemi težke vijačne stružnice
Znotraj kotnega odstopanja, ki ne presega 90 °, se poveča električni sinhronizacijski moment. Da bi zagotovili pomemben sinhronizacijski navor, morajo sinhroni komunikacijski stroji pri vseh možnih kotnih frekvencah vrtenja delovati z velikimi zdrsi (ne manj kot 0,3 - 0,5). Zato morajo biti ti stroji dovolj veliki, da preprečijo nesprejemljivo segrevanje.
Moč strojev se dodatno poveča, da se odpravi vpliv nihanja obremenitev in tornih sil. Uporabljajo se tudi mehanski prenosi, ki zmanjšajo frekvenco vrtenja gredi stroja in s tem zmanjšajo velikost kotne napake, zmanjšane na gred stroja.Pred začetkom delovanja električne gredi sta asinhronska stroja A1 in A2 priključena na enofazni napajalnik. V tem primeru rotor stroja A2 zavzame začetni položaj, ki ustreza položaju rotorja stroja A1.
Sinhroni rotacijski sistemi se racionalno uporabljajo za stroje za rezanje težkih kovin, saj je proizvodnja dolgih vodilnih vijakov povezana s precejšnjimi težavami.Poleg tega se s povečanjem dolžine vijakov ali gredi zaradi njihovega zvijanja zmanjša natančnost koordinacije medsebojne razporeditve delov stroja. V sistemu električne gredi razdalja med gredmi ne more vplivati na natančnost delovanja.
Pri uporabi električne gredi odpadejo mehanske povezave čeljusti z vretenom in močno se poenostavi kinematični diagram. Pomembna pomanjkljivost sistemov električne gredi v strojih za rezanje težkih kovin je možnost poškodbe dragega dela med izpadom električne energije, saj takoj pride do neusklajenosti. V nekaterih primerih lahko v takšni nesreči preprečimo poškodbe obdelovanca s hitrim samodejnim umikom orodja.
Za strojništvo je zanimiva shema z dvema enakima asinhronima motorjema s faznimi rotorji (slika 4). Ker je tokokrog obeh rotorjev sklenjen na reostat R, se ob priklopu motorjev na izmenično omrežje oba rotorja začneta vrteti.
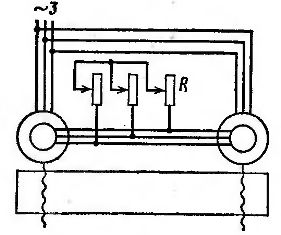
riž. 4. Shema sinhrone komunikacije z rotacijskim reostatom
Poleg tokov, ki tečejo v navitjih rotorja in reostata, v tokokrogu rotorja obeh strojev teče izravnalni tok. Prisotnost tega toka povzroči nastanek sinhronizacijskega momenta, zaradi česar se stroji vrtijo sinhrono. Ta sistem se lahko uporablja za dvigovanje in spuščanje prečnih ročic velikih skobeljnikov, rezkalnikov in vrtiljakov.
Zahvaljujoč sistemu električne gredi je rešen problem usklajenega gibanja transporterjev, ki so del proizvodnega kompleksa.Najbolj praktična uporaba v tem primeru je pridobljena iz različice sinhronega vrtenja motorjev s skupnim frekvenčnim pretvornikom.
Poleg obravnavanih električnih grednih sistemov za strojegradnjo so bili razviti in uporabljeni tudi drugi izmenični strojni sistemi, vključno z enofaznimi sistemi in sistemi s sinhronimi motorji posebne konstrukcije.