Načelo delovanja in naprava elektromotorja
Vsak elektromotor je zasnovan za opravljanje mehanskega dela zaradi porabe električne energije, ki se nanj nanaša, ki se običajno pretvori v rotacijsko gibanje. Čeprav v tehnologiji obstajajo modeli, ki takoj ustvarijo translacijsko gibanje delovnega telesa. Ti se imenujejo linearni motorji.
V industrijskih napravah elektromotorji poganjajo različne kovinskorezalne stroje in mehanske naprave, ki sodelujejo v tehnološkem proizvodnem procesu.
Znotraj gospodinjskih aparatov električni motorji poganjajo pralne stroje, sesalnike, računalnike, sušilnike za lase, otroške igrače, ure in številne druge naprave.

Osnovni fizikalni procesi in princip delovanja
Pri premikanju v notranjosti magnetno polje električni naboji, ki jih imenujemo električni tokovi, imajo vedno mehansko silo, ki teži k odklonu njihove smeri v ravnini, ki je pravokotna na usmerjenost silnic magnetnega polja.Ko gre električni tok skozi kovinsko žico ali tuljavo iz nje, ta sila teži k premikanju/sukanju vsake žice, po kateri teče tok, in celotne tuljave kot celote.
Spodnja fotografija prikazuje kovinski okvir, skozi katerega teče tok. Magnetno polje, ki deluje nanj, ustvarja silo F za vsako vejo okvirja, kar ustvarja rotacijsko gibanje.

Ta lastnost medsebojnega delovanja električne in magnetne energije, ki temelji na ustvarjanju elektromotorne sile v sklenjeni prevodni zanki, deluje na vsakem elektromotorju. Njegova zasnova vključuje:
-
tuljava, skozi katero teče električni tok. Postavljen je na posebno sidrno jedro in pritrjen na vrtljive ležaje, da se zmanjša odpornost na sile trenja. Ta zasnova se imenuje rotor;
-
stator, ki ustvarja magnetno polje, ki s svojimi linijami sile prodre električne naboje, ki potekajo vzdolž zavojev navitja rotorja;
-
ohišje za namestitev statorja. V notranjosti telesa so izdelani posebni sedeži, znotraj katerih so nameščene zunanje kletke ležajev rotorja.
Poenostavljeno zasnovo najpreprostejšega elektromotorja lahko predstavimo s sliko naslednje oblike.

Ko se rotor vrti, se ustvari navor, katerega moč je odvisna od splošne zasnove naprave, količine uporabljene električne energije in njenih izgub med pretvorbami.
Velikost največjega možnega navora motorja je vedno manjša od električne energije, ki se nanj nanaša. Zanj je značilna vrednost učinkovitosti.
Vrste elektromotorjev
Glede na vrsto toka, ki teče skozi tuljave, jih delimo na enosmerne in izmenične motorje.Vsaka od teh dveh skupin ima veliko število modifikacij z uporabo različnih tehnoloških procesov.
DC motorji
Imajo statorsko magnetno polje, ki ga ustvari stacionarna fiksna trajni magneti ali posebni elektromagneti z vzbujalnimi tuljavami. Armaturna tuljava je trdno vpeta v gred, ki je vpeta v ležaje in se lahko prosto vrti okoli lastne osi.
Osnovna zgradba takega motorja je prikazana na sliki.

Na jedru armature, izdelanem iz feromagnetnih materialov, je tuljava, sestavljena iz dveh zaporedno vezanih delov, ki sta na enem koncu povezana s prevodnimi kolektorskimi ploščami, na drugem pa med seboj. Dve grafitni ščetki sta nameščeni na diametralno nasprotnih koncih armature in sta pritisnjeni na kontaktne plošče kolektorskih plošč.
Pozitiven potencial vira enosmernega toka se uporabi za spodnjo krtačo z vzorcem in negativni potencial za zgornjo. Smer toka, ki teče skozi tuljavo, je prikazana s črtkano rdečo puščico.
Tok povzroči, da ima magnetno polje severni pol na spodnji levi strani armature in južni pol na zgornji desni strani armature (kardansko pravilo). Posledica tega je odbijanje polov rotorja od stacionarnih istoimenskih in privlačnost nasprotnih polov statorja. Kot posledica uporabljene sile pride do rotacijskega gibanja, katerega smer je označena z rjavo puščico.
Z nadaljnjim vrtenjem armature po inerciji se poli prenesejo na druge kolektorske plošče. Smer toka v njih je obrnjena. Rotor se še naprej vrti.
Preprosta zasnova takšne kolektorske naprave povzroča velike izgube električne energije.Takšni motorji delujejo v napravah preproste zasnove ali igračah za otroke.
Elektromotorji z enosmernim tokom, vključeni v proizvodni proces, imajo bolj zapleteno zasnovo:
-
tuljava ni razdeljena na dva, ampak na več delov;
-
vsak del tuljave je nameščen na svojem drogu;
-
kolektorska naprava je izdelana z določenim številom kontaktnih ploščic glede na število navitij.
Posledično se ustvari gladka povezava vsakega pola preko njegovih kontaktnih plošč s ščetkami in tokovnim virom ter zmanjšajo izgube energije.
Naprava takšnega sidra je prikazana na fotografiji.
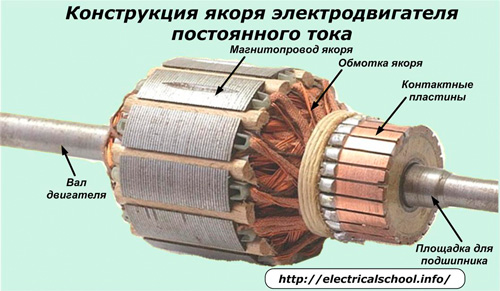
Pri enosmernih motorjih je mogoče smer vrtenja rotorja obrniti. Če želite to narediti, je dovolj, da spremenite gibanje toka v tuljavi v nasprotno s spremembo polarnosti na viru.
AC motorji
Od prejšnjih modelov se razlikujejo po tem, da je električni tok, ki teče v njihovi tuljavi, opisan z sinusni harmonični zakonobčasno spreminja svojo smer (znak). Za njihovo napajanje se napetost napaja iz generatorjev z izmeničnimi znaki.
Stator takih motorjev izvaja magnetno vezje. Izdelan je iz feromagnetnih plošč z utori, v katere so nameščeni zavoji tuljave z okvirno (tuljavno) konfiguracijo.

Sinhroni elektromotorji
Spodnja fotografija prikazuje princip delovanja enofaznega AC motorja s sinhronim vrtenjem elektromagnetnih polj rotorja in statorja.

V utorih magnetnega tokokroga statorja na diametralno nasprotnih koncih so nameščene žice za navijanje, ki so shematično prikazane v obliki okvirja, skozi katerega teče izmenični tok.
Oglejmo si primer trenutka v času, ki ustreza prehodu pozitivnega dela njegovega polvala.
V nosilnih celicah se prosto vrti rotor z vgrajenim trajnim magnetom, v katerem sta jasno določena severni «N ustje» in južni «S ustje» pola. Ko skozi navitje statorja teče pozitivni polval toka, se v njem ustvari magnetno polje s poloma «S st» in «N st».
Med magnetnimi polji rotorja in statorja nastanejo interakcijske sile (pri čemer se poli odbijajo in za razliko od polov privlačijo), ki težijo k obračanju armature motorja iz katerega koli položaja v skrajni položaj, ko sta nasprotna pola čim bližje drug drugemu drugo.
Če upoštevamo isti primer, vendar v trenutku, ko nasprotni - negativni pol val toka prehaja skozi žico okvirja, se bo vrtenje armature zgodilo v nasprotni smeri.
Za zagotovitev neprekinjenega gibanja rotorja v statorju ni izdelan en navit okvir, temveč določeno število njih, glede na to, da vsakega od njih napaja ločen vir toka.
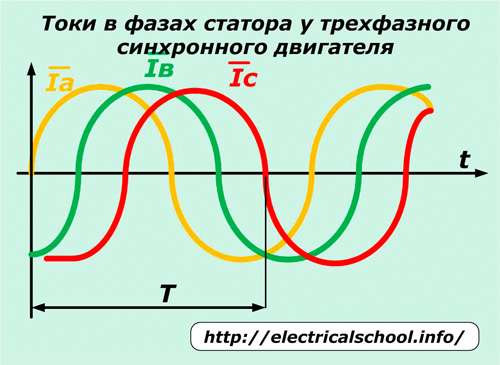
Načelo delovanja trifaznega AC motorja s sinhronim vrtenjem, elektromagnetna polja rotorja in statorja so prikazana na naslednji sliki.

Pri tej zasnovi so tri tuljave A, B in C nameščene znotraj magnetnega vezja statorja, med seboj zamaknjene za kot 120 stopinj. Tuljava A je označena z rumeno, B z zeleno in C z rdečo. Vsaka tuljava je izdelana z enakimi okvirji kot v prejšnjem primeru.
Na sliki v vsakem primeru teče tok samo po eni tuljavi v smeri naprej ali nazaj, kar označujeta znaka «+» in «-».
Ko pozitivni polval prehaja skozi fazo A v smeri naprej, zavzame os polja rotorja vodoravno lego, ker se v tej ravnini oblikujejo magnetni poli statorja in privlačijo gibljivo armaturo. Nasprotna pola rotorja se približujeta polom statorja.
Ko pozitivni polval preide v fazo C, se bo armatura zavrtela za 60 stopinj v smeri urinega kazalca. Ko se tok uporabi za fazo B, bo prišlo do podobnega vrtenja armature. Vsak naslednji pretok toka v naslednji fazi naslednjega navitja bo vrtel rotor.
Če na vsako navitje nanesemo trifazno omrežno napetost, premaknjeno za kot 120 stopinj, potem v njih krožijo izmenični tokovi, ki bodo vrteli armaturo in ustvarili njeno sinhrono vrtenje z uporabljenim elektromagnetnim poljem.
Ista mehanska zasnova se uspešno uporablja v trifaznem koračnem motorju… Samo v vsakem navitju s krmiljenjem poseben krmilnik (gonilnik koračnega motorja) Konstantni impulzi se uporabijo in odstranijo v skladu z zgoraj opisanim algoritmom.
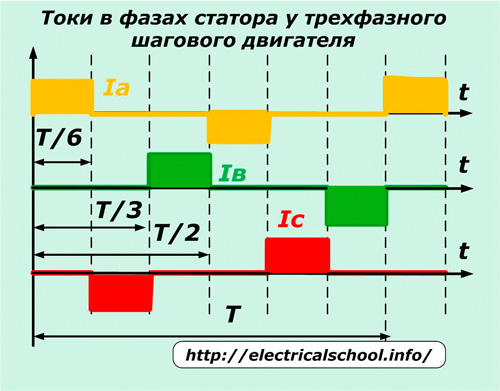
Njihov zagon sproži rotacijsko gibanje, njihov zaključek v določenem trenutku pa zagotavlja izmerjeno vrtenje gredi in zaustavitev pod programiranim kotom za izvedbo določenih tehnoloških operacij.
Pri obeh opisanih trifaznih sistemih je možno spreminjati smer vrtenja armature. Če želite to narediti, morate samo spremeniti zaporedje faz «A» — «B» — «C» v drugo, na primer «A» — «C» — «B».
Hitrost rotorja se regulira z dolžino obdobja T. Njeno zmanjšanje povzroči pospešek vrtenja.Velikost amplitude toka v fazi je odvisna od notranjega upora navitja in vrednosti napetosti, ki se nanj nanaša. Določa količino navora in moč elektromotorja.
Asinhroni motorji
Te zasnove motorjev imajo enako statorsko magnetno vezje z navitji kot v prej obravnavanih enofaznih in trifaznih modelih. Ime so dobili po asinhronem vrtenju elektromagnetnega polja armature in statorja. To dosežemo z izboljšanjem konfiguracije rotorja.
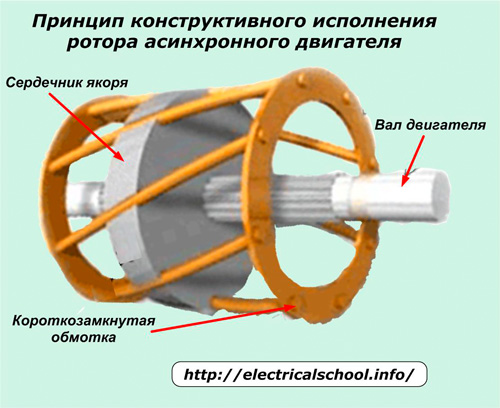
Njegovo jedro je izdelano iz elektrotehničnih jeklenih plošč. Opremljeni so z aluminijastimi ali bakrenimi tokovnimi vodniki, ki so na koncih armature zaprti s prevodnimi obroči.
Ko je napetost na navitjih statorja, se v navitju rotorja z elektromotorno silo inducira električni tok in ustvari magnetno polje armature. Ko ta elektromagnetna polja medsebojno delujejo, se začne gred motorja vrteti.
Pri tej zasnovi je gibanje rotorja možno šele po pojavu vrtljivega elektromagnetnega polja v statorju in se z njim nadaljuje v asinhronem načinu delovanja.
Asinhroni motorji so enostavnejši po zasnovi, zato so cenejši in se pogosto uporabljajo v industrijskih inštalacijah in gospodinjskih aparatih.

Eksplozijsko odporen električni motor ABB
Linearni motorji
Številna delovna telesa industrijskih mehanizmov izvajajo povratno ali translacijsko gibanje v eni ravnini, kar je potrebno za delovanje strojev za obdelavo kovin, vozil, udarcev kladiva pri zabijanju pilotov ...
Premikanje takega delovnega telesa s pomočjo menjalnikov, krogličnih vijakov, jermenskih pogonov in podobnih mehanskih naprav iz rotacijskega elektromotorja zaplete konstrukcijo. Sodobna tehnična rešitev tega problema je delovanje linearnega elektromotorja.
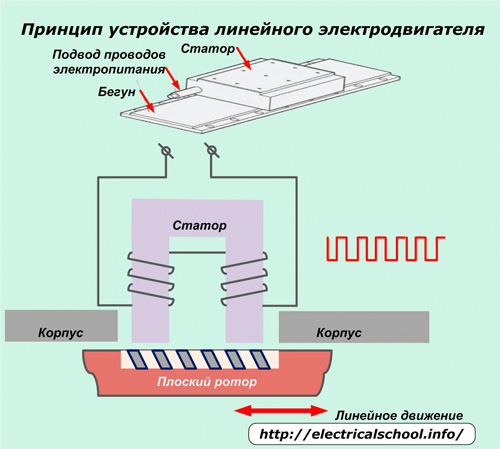
Njegov stator in rotor sta podolgovata v obliki trakov, ne pa navita v obroče, kot pri rotacijskih elektromotorjih.
Načelo delovanja je posredovanje izmeničnega linearnega gibanja tekalnemu rotorju zaradi prenosa elektromagnetne energije iz stacionarnega statorja z odprtim magnetnim krogom določene dolžine. V njem se ustvari delovno magnetno polje z zaporednim vklopom toka.
S kolektorjem deluje na navitje armature. Sile, ki nastanejo v takem motorju, premikajo rotor samo v linearni smeri vzdolž vodilnih elementov.
Linearni motorji so zasnovani tako, da delujejo na enosmerni ali izmenični tok in lahko delujejo v sinhronem ali asinhronem načinu.
Slabosti linearnih motorjev so:
-
zapletenost tehnologije;
-
visoka cena;
-
nizka energetska učinkovitost.