Variabilni električni pogon kot način varčevanja z energijo
 Prehod z nereguliranega električnega pogona na regulirani je eden glavnih načinov varčevanja z energijo v elektro pogonu in na tehnološkem področju z električnim pogonom.
Prehod z nereguliranega električnega pogona na regulirani je eden glavnih načinov varčevanja z energijo v elektro pogonu in na tehnološkem področju z električnim pogonom.
Potrebo po nadzoru hitrosti ali navora električnih pogonov proizvodnih mehanizmov praviloma narekujejo zahteve tehnološkega procesa. Na primer, hitrost podajanja rezalnika določa čistost obdelave obdelovanca na stružnici, zmanjšanje hitrosti dvigala je potrebno za natančno pozicioniranje avtomobila pred ustavitvijo, potrebo po prilagoditvi navora navijalne gredi narekuje pogoji za vzdrževanje stalne sile napetosti ranjenega materiala itd.
Obstaja pa vrsta mehanizmov, ki ne zahtevajo spreminjanja hitrosti glede na tehnološke pogoje ali pa se za regulacijo uporabljajo druge (neelektrične) metode vplivanja na parametre tehnološkega procesa.
Najprej vključujejo neprekinjene transportne mehanizme za premikanje trdnih, tekočih in plinastih izdelkov: transporterji, ventilatorji, ventilatorji, črpalne enote. Za te mehanizme se trenutno praviloma uporabljajo neregulirani asinhroni električni pogoni, ki poganjajo delovna telesa s konstantno hitrostjo, ne glede na obremenitev mehanizmov. Pri njegovi delni obremenitvi so načini delovanja pri konstantni hitrosti značilni povečani specifična poraba energije v primerjavi z nominalnim načinom.
Z zmanjšanjem zmogljivosti NSC se učinkovitost transportnega traku zmanjša, saj relativni delež porabljene moči premaga trenutek prostega teka. Bolj ekonomičen je način s spremenljivo hitrostjo, ki zagotavlja enako zmogljivost, vendar s konstantno komponento vlečnega napora.
Na sl. 1 prikazuje odvisnosti moči gredi motorja za transporter s trenutkom prostega teka Mx = 0, ZMv za konstantno (v — const) in nastavljivo (Fg = const) hitrost gibanja bremen. Osenčeno območje na sliki predstavlja prihranek energije, dosežen z nadzorom hitrosti.
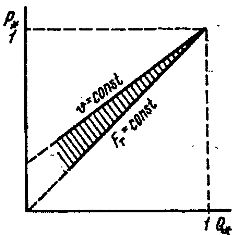
riž. 1. Odvisnost moči gredi elektromotorja od zmogljivosti transportnega traku
Torej, če se hitrost tekočega traku zmanjša na 60% nazivne vrednosti, se bo moč gredi motorja zmanjšala za 10% v primerjavi z nazivno vrednostjo. Učinek regulacije hitrosti je tem večji, čim večji je vrtilni moment v prostem teku in tem občutneje se zmanjša zmogljivost transportnega traku.
Zmanjšanje hitrosti neprekinjenih transportnih mehanizmov s premajhno obremenitvijo vam omogoča, da opravite zahtevano količino dela z manjšo specifično porabo energije, to je, da rešite povsem ekonomski problem zmanjšanja porabe energije v tehnološkem procesu premikanja izdelkov.
Običajno se z zmanjšanjem hitrosti takšnih mehanizmov pojavi tudi ekonomski učinek zaradi izboljšanja obratovalnih lastnosti tehnološke opreme. Torej, ko se hitrost zmanjša, se obraba telesa transporterja zmanjša, življenjska doba cevovodov in fitingov se poveča zaradi zmanjšanja tlaka, ki ga razvijejo stroji za dovajanje tekočin in plinov, prav tako se odpravi prekomerna poraba teh izdelkov.
Učinek na področju tehnologije se pogosto izkaže za bistveno večjega kot zaradi varčevanja z energijo, zato je bistveno napačno odločati o smotrnosti uporabe krmiljenega električnega pogona za takšne mehanizme z ocenjevanjem le energetskega vidika.
Nadzor hitrosti strojev z lopato.
Centrifugalni mehanizmi za oskrbo s tekočinami in plini (ventilatorji, črpalke, ventilatorji, kompresorji) so glavni splošni industrijski mehanizmi z največjim potencialom v vsej državi za bistveno zmanjšanje specifične porabe energije. Poseben položaj centrifugalnih mehanizmov je razložen z njihovo masivnostjo, veliko močjo, praviloma z dolgim načinom delovanja.
Te okoliščine določajo pomemben delež teh mehanizmov v energetski bilanci države.Skupna instalirana moč pogonskih motorjev za črpalke, ventilatorje in kompresorje je okoli 20 % moči vseh elektrarn, samo ventilatorji pa porabijo okoli 10 % vse proizvedene električne energije v državi.
Delovne lastnosti centrifugalnih mehanizmov so predstavljene v obliki odvisnosti glave H od pretoka Q in moči P od pretoka Q. V stacionarnem načinu delovanja je glava, ki jo ustvari centrifugalni mehanizem, uravnotežena z tlak hidro- ali aerodinamičnega omrežja, v katerem dovaja tekočino ali plin.
Statična komponenta tlaka je določena za črpalke — z geodetsko razliko med nivoji uporabnika in črpalke; za ljubitelje — naravne znamenitosti; za ventilatorje in kompresorje - od tlaka stisnjenega plina v omrežju (rezervoar).
Točka presečišča Q-H-karakteristik črpalke in omrežja določa parametra H-Hn in Q — Qn. Regulacija pretoka Q črpalke, ki deluje s konstantno hitrostjo, se običajno izvaja z ventilom na izhodu in povzroči spremembo karakteristike omrežja, zaradi česar pretok QA * <1 ustreza točka presečišča s karakteristiko črpalke.
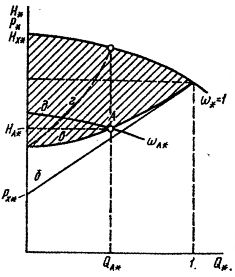
riž. 2. Q-H-karakteristike črpalne enote
Po analogiji z električnimi tokokrogi je regulacija pretoka skozi ventil podobna regulaciji toka s povečanjem električnega upora tokokroga. Očitno ta način regulacije z energetskega vidika ni učinkovit, saj ga spremljajo neproduktivne izgube energije v regulacijskih elementih (upor, ventil). Za izgubo ventila je značilno zasenčeno območje na sl. 1.
Tako kot v električnem tokokrogu je bolj ekonomično regulirati vir energije kot pa njegovega uporabnika. V tem primeru se obremenitveni tok zmanjša v električnih tokokrogih zaradi zmanjšanja napetosti vira. V hidravličnih in aerodinamičnih omrežjih se podoben učinek doseže z zmanjšanjem tlaka, ki ga ustvarja mehanizem, kar se doseže z zmanjšanjem hitrosti njegovega rotorja.
Ko se hitrost spremeni, se delovne značilnosti centrifugalnih mehanizmov spremenijo v skladu z zakoni podobnosti, ki imajo obliko: Q * = ω *, H * = ω *2, P * = ω *3
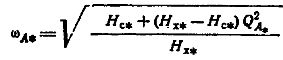
Hitrost rotorja črpalke, pri kateri bo njegova karakteristika prešla skozi točko A:
Izraz za moč, ki jo porabi črpalka med regulacijo hitrosti je:

Kvadratna odvisnost momenta od hitrosti je značilna predvsem za ventilatorje, saj je statična komponenta glave, ki jo določa naravni potisk, bistveno manjša od Hx. V tehnični literaturi se včasih uporablja približna odvisnost trenutka od hitrosti, ki upošteva to lastnost centrifugalnega mehanizma:
M* = ω *n
kjer je n = 2 pri Hc = 0 in nHc> 0. Izračuni in poskusi kažejo, da je n = 2 - 5, njegove velike vrednosti pa so značilne za kompresorje, ki delujejo v omrežju s pomembnim protitlakom.
Analiza načinov delovanja črpalke pri konstantni in spremenljivi hitrosti kaže, da se presežna poraba energije pri ω= const izkaže za zelo pomembno. Na primer, rezultati izračuna načinov delovanja črpalke s parametri so prikazani spodaj Hx * = 1,2; Px*= 0,3 na omrežju z različnim protitlakom Zс:
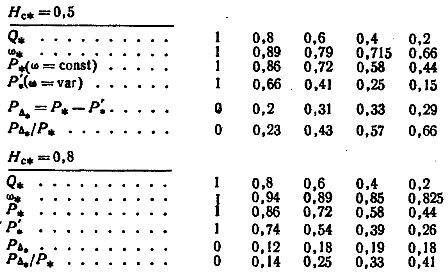
Navedeni podatki kažejo, da lahko krmiljeni električni pogon bistveno zmanjša porabo porabljene električne energije: do 66 % v prvem in do 41 % v drugem primeru. V praksi se lahko izkaže, da je ta učinek še večji, saj zaradi različnih razlogov (odsotnost ali okvara ventilov, ročno krmiljenje) regulacija z ventili sploh ni uporabljena, kar vodi ne le v povečanje porabe električne energije, temveč tudi do prevelikih naporov in stroškov v hidravličnem omrežju.
Energetska vprašanja centrifugalnih mehanizmov z enojnim delovanjem v omrežju s konstantnimi parametri so bila obravnavana zgoraj. V praksi obstaja vzporedno delovanje centrifugalnih mehanizmov in omrežje ima pogosto spremenljive parametre. Na primer, aerodinamični upor rudarskega omrežja se spreminja s spremembo dolžine sten, hidrodinamični upor vodovodnih omrežij je določen z načinom porabe vode, ki se spreminja čez dan itd.
Pri vzporednem delovanju centrifugalnih mehanizmov sta možna dva primera:
1) hitrost vseh mehanizmov se regulira hkrati in sinhrono;
2) regulirana je hitrost enega mehanizma ali dela mehanizmov.
Če so parametri omrežja konstantni, potem lahko v prvem primeru vse mehanizme obravnavamo kot en ekvivalent, za katerega veljajo vse zgornje povezave. V drugem primeru ima tlak nereguliranega dela mehanizma enak učinek na regulirani del kot protitlak in je zelo pomemben, zato prihranek električne energije tukaj ne presega 10-15% nazivne moči. stroja.
Spremenljivi parametri omrežja močno otežijo analizo sodelovanja centrifugalnih mehanizmov z omrežjem. V tem primeru je energijsko učinkovitost krmiljenega električnega pogona mogoče določiti v obliki območja, katerega meje ustrezajo mejnim vrednostim parametrov omrežja in hitrosti centrifugalnega mehanizma.
Glej tudi na to temo: Frekvenčni pretvorniki VLT AQUA Drive za črpalne enote